Single-Source Shortest Paths (SSSP)
מסלולים קצרים ביותר בגרף
אחת הבעיות הנפוצות ביותר בגרפים היא מציאת המסלול הקצר ביותר. אך לבעיה זאת יש מספר סוגים והיא משתנה בהתאם להאם הגרף מכוון או לא והאם הוא ממשוקל או לא.
באופן מסויים, אם הקלט הוא גרף לא מכוון נוכל תמיד להפוך כל קשת לשתי קשתות שמכוונות כל אחת לכיוון השני ואם הוא לא ממושקל נוכל תמיד להגדיר משקל של
בכל מקרה נסמן
כעלות המינימלית ביותר של מסלול מ
ישנן מספר וריאציות לבעית המסלול הקצר ביותר
א) single pair- בהינתן גרף
ב) single source- זאת הבעיה בה נתמקד כאן, SSSP , בהינתן גרף
ג) all pairs- זאת בעיית All-Pairs Shortest Paths (APSP), מחשב את המסלול הקצר ביותר לכל זוג קודקודים
נשים לב שאלגוריתם ל APSP הוא גם אלגוריתם תקף ל SSSP והוא אלגוריתם תקף ל SPSP. כמו כן אין אלגוריתם ידוע עבור SPSP (single pair) שהוא יותר יעיל מפשוט לפתור את SSSP .
הגדרת SSSP
אם כן ישנם שתי מקרים שבהם נוכל להתמקדם , הראשון הוא גרף לא ממושקל, במצב זה נוכל לפתור את הבעיה באמצעות BFS .כאן, אתמקד בגרף המכוון שכן האלגוריתם שיתואר כאן כפי שאמרנו, מתאים גם עבור גרף לא מכוון פשוט פחות יעיל מהפתרון לעיל.
עץ מסלולים קצרים ביותר
ב SSSP, ישנם
תתי המסלולים של מסלול קצר ביותר, קצרים ביותר- בהינתן
הוכחה: נחלק את P כך-
ואז מתקיים
אם היה קיים
אם כן נקבל את ההבחנה הבאה ממשפט זה:
המסלול בעל עלות נמוכה ביותר
באופן כללי המטרה שלנו היא לבנות את העץ הזה בחישוב SSSP. באופן הזה נוכל להמנע מלחשב
כמו כן , נשים לב ש APSP ניתן לחישוב על ידי בנייה של עץ כזה כאשר כל פעם קודקוד אחר הוא השורש. סך הכל
קשתות שליליות
בבעיית SSSP ייתכן וגרף הקלט מכיל קשתות עם משקל שלילי:
א) אם הגרף לא מכיל מעגלים שליליים (מסלול שהוא מעגל שסכום הקשתות שלו שלילי) מקדוקוד המקור
ב) אם הגרף מכיל מעגל שלילי מ
יש כמה אלגוריתמים שפתורים בעיית מציאת מסלול קצר ביותר שמניחים שכל הקשתות אי-שליליות (כמו דייקסטרה).
לעומת זאת , יש אלגוריתמים שמאפשרים קשתות שליליים בגרף הקלט , ומחזיר תשובה נכונה כל עוד אין מעגלים שליליים נגישים מקודקוד המקור , אחרת , אם יש מעגל שלילי, האלגוריתם מזהה אותו ומדווח על קיומו .
מעגלים
נשאלת השאלה האם מסלול קצר ביותר יכול להכיל מעגל?
ראשית נראה שמעגל שלילי לא ייתכן במסלול קצר ביותר, נסתכל על הגרף הבא
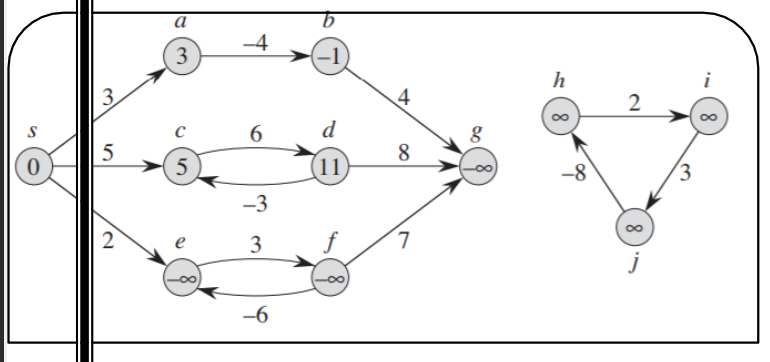
יש רק מסלול אחד מ
נשים לב אבל, שיש אינסוף מסלולים מ
באופן דומה יש אינסוף מסלולים
אם כן , כפי שראינו בדוגמה לא ייתכן שיכיל מעגל שלילי.
טענה: מסלול קצר ביותר לא יכול להכיל מעגל חיובי.
הוכחה: יהי
כלומר המסלול המתקבל ממחיקת המעגל והוספת תת המסלול במעגל הזה עד לקודקוד שממנו ממשיכים הלאה לאורך המסלול ב P . נשים לב שמתקיים
נשים לב למקרה שבו המעגלים הם ניטרליים כלומר המשקל שלהם הוא 0 - התהליך הנ״ל לא ישתנה שכן עדיין נוכל לקבל מסלול בלי מעגלים קצר ביותר שמשקלו שקול למשקל הגרף עם המעגל הניטרלי.
מסקנה: מסלול קצר ביותר בגרף
ייצוג המסלולים הקצרים ביותר
לא נרצה רק לחשב משקל המסלול המינימלי , אלא גם לדעת מה הוא .
באופן דומה לBFS נשמור לכל קודקוד ערך
print_path(G,s,v)
if v==s
print s
else if v.𝜋 == Nil
no path from s to v exists
else print_path(G,s,v.𝜋)
print v
נרצה אם כן להשתמש ביכולת הזאת להשיג את המסלול בשביל להשיג את הגרף
נרצה להראות עבור אלגוריתם למציאת sssp שערכי ה
באופן פורמלי ננסח זאת כך: יהי
עץ המסלולים הקצרים ביותר ששורשו
א)
ב)
ג) לכל
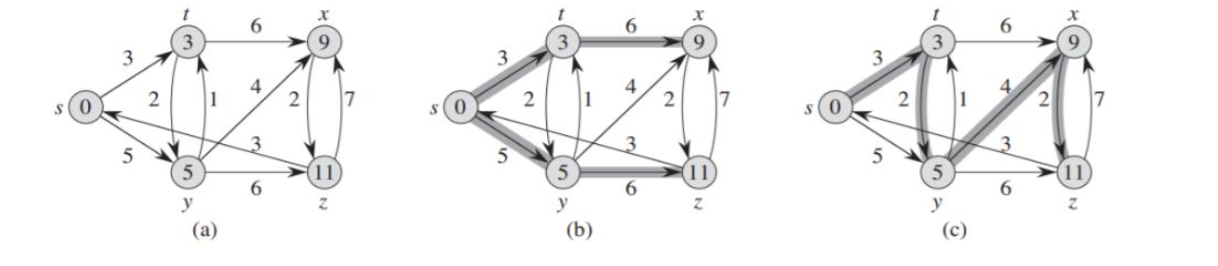
נשים לב שהמסלולים לא בהכרח ייחודיים, וכך גם עץ המסלולים הקצרים ביותר אינו ייחודי למשל:
Relaxation
האלגוריתם שנראה בהמשך, משתמש בטכניקה שנקראת ״הקלה״ או Relaxation בלעז.
לכל קודקוד
initialize_single_source(G,s):
for each vertex v in G.V
v.d = INFINITY
v.𝜋 = NIL
s.d = 0
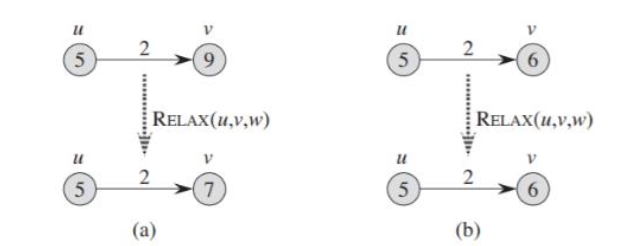
כעת תהליך ההקלה של קשת
אם כן נשים לב שהתהליך של ההקלה יכול רק להקטין את הערך
relax(u,v,w)
if v.d > u.d + w(u,v)
v.d = u.d + w(u,v)
v.𝜋 = u
האלגוריתם הגנרי שנראה בהמשך ישתמש בשתי הפונקציות שבנינו , בראשונה בתחילת האלגוריתם ובהקלה הוא ישתמש שוב ושוב עד לסיום התהליך כלומר עד שלא ניתן להקטין יותר את d. האלגוריתמים נבדלים זה מזה בכמות הפעמים שקוראים לפונקציית הההקלה עבור כל קשת וכמובן הסדר שבו מבצעים את ההקלות.
תכונות של relaxation
א) אי שיוויון המשולש:
ב) תכונת החסם העליון:
תמיד מתקיים
וכאשר
הוכחה: באינדוקצייה על מספר פעולות ההקלה .
בסיס- לאחר האתחול של מקור יחיד עבור
צעד- נניח שלפני ביצוע relax((u,v),w) מתקיים שלכל הקודקודים ב
פעולת ההקלה יכולה לשנות רק את הערך של
ג) חוסר המסלול:
אם אין מסלול מ
הוכחה- אם אין מסלול מ
ד) התכנסות:
אם המסלול
ההוכחה נובעת מתכונת החסם העליון תמיד יקיים
אחרת, לפני ההקלה יתקיים
ולאחר ההקלה יתקיים
והשיוויון מתקיים כדרוש.
ה) path relaxation:
אם
בלי קשר האם עשינו פעולות הקלה נוספות על קשתות שלא במסלול.
גם את הטענה הזאת אפשר להוכיח באינדוקצייה על מספר ההקלות בתת המסלול.
בסיס- עבור
ומטענת החסם העליון זה לא ישתנה לאורך כל התוכנית.
צעד- נניח שלפני ההקלה
בגלל שזה נכון מהנחת האינדוקצייה בפרט עבור
ו) predecessor subgraph
כאשר
נשים לב שהמשפטים הללו נכונים רק בהנחה שהאלגוריתם מתחיל בפונקציית האתחול ושינוי של הערכים לאחר מכן נעשה רק בפונקציית ההקלה
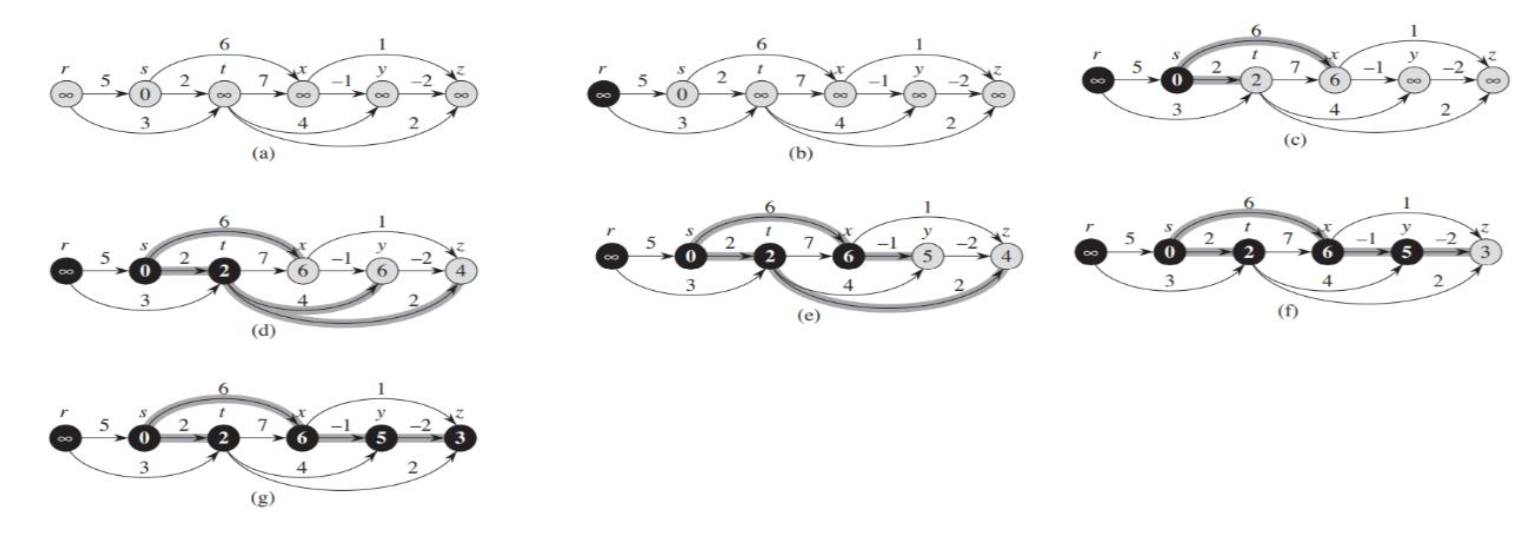
Bellman-Ford Algorithm
האלגוריתם פותר את בעיית SSSP במקרה הכללי, שבו ייתכנו קשתות שליליות.
קלט: גרף מכוון
פלט: True אם אין מעגלים שליליים, ועבור כל קודקוד
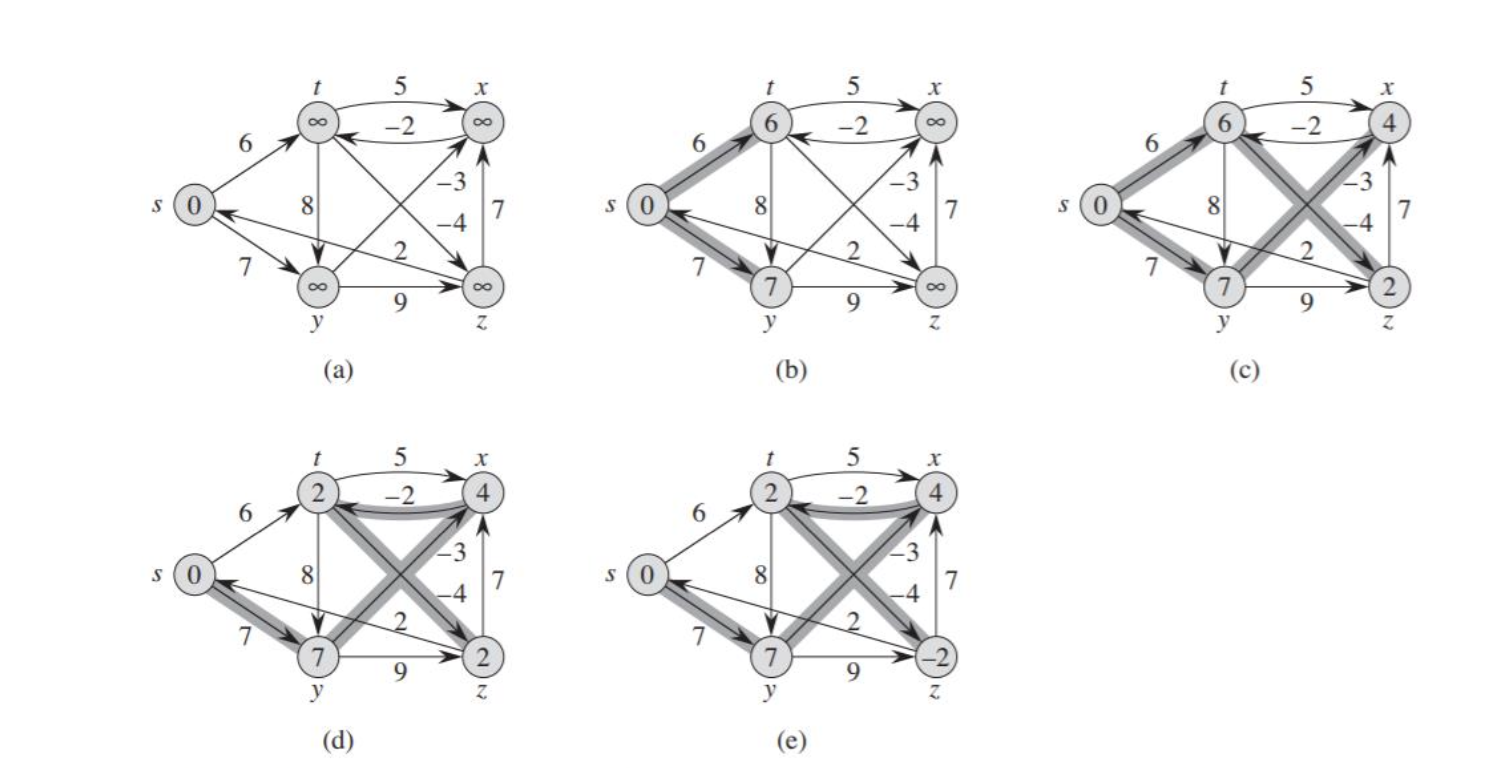
bellman_ford(G,w,s)
initialize_single_source(G,s)
for i=1 to |V|-1:
for each (u,v) in E
relax(u,v,w)
\\check for negative cycles
for each edge (u,v) in E
if v.d > u.d + w(u,v)
return FALSE
return TRUE
הרעיון בשלב הבדיקה אם נשים לב לתנאי, זה בעצם ביצוע הקלה נוספת, מתכונה (ה) שציינו למעלה לאחר ההקלה הנוספת הערך של קודקוד כלשהו לא אמור להשתנות בהינתן שכבר יש לנו מסלול קצר ביותר, אם זה אכן השתנה, אז בוודאות יש מעגל שלילי שבהקלה נוספת שוב יקטין את הערך עד ל
זמן הריצה
האתחול בשורה 1 עולה
סה״כ
הוכחת נכונות
בשביל להתחיל להוכיח נכונות של האלגוריתם נוכיח את הלמה הבאה
יהי
אחרי
נחלק למקרים:
אם הקודקוד לא נגיש אז אנחנו יודעים שאין מסלול קצר ביותר ולכן
אם הקודקוד נגיש מ
כפי שכבר טענו במסלול קצר ביותר אין מעגלים כלומר הוא מסלול פשוט ולכן אורכו
אם כן, יתקיים שלכל
סה״כ על פי למת ה path relaxation מלמעלה נקבל
המסקנה המתבקשת היא שיש מסלול קצר ל v מ s ביותר לאחר האלגוריתם אם ורק אם הערך v.d קטן מ אינסוף
כעת נוכל להשתמש בלמה הנ״ל והתכונות האחרות להוכחת הנכונות
נניח ש
ועל פי טענת predecessor subgraph נובע ש
כל שנשאר לעשות הוא להראות שהאלגוריתם מחזיר true
לכל
לכן אם אין מעגלים שליליים מאי שיוויון המשולש למעלה לעולם לא נכנס לשורה שמחזירה false, כלומר נחזיר true.
כעת אם
כעת נניח בשלילה שהאלגוריתם מחזיר true אם כן:
כיוון שהתנאי כדי להחזיר false לא מתקיים לאף קשת ופרט לכל קשתות המסלול C .
כיוון ש
כלומר קיבלנו
וזה ייתכן רק אם
SSSP in DAG
עבור גרף מכוון חסר מעגלים (DAG) אלגוריתם Bellman-Ford פותר את בעיית SSSP עבורו בזמן
נתאר אלגוריתם שממיין את הקודקודים על ידי מיון טופולוגי ואז מאתחלים מהקודקוד הראשון בסידור הטופולוגי, עבור כל קשת יוצרת נבצע הקלה. נזכר שאם קיין מסלול מ
DAG_SSSP(G,w,s)
topologically_sort(G)
initialize_single_source(G,s)
for i=1 to |V|
for each u in adj(v_i)
relax(u,v_i,w)
הרעיון כאן הוא שאנחנו יודעים בידיוק מיהן הקשתות שיושפעו מההקלה ולכן לא צריך לבצע את ההקלטה על כל הקשתות אלא רק על השכנים במצב של מיון טופולוגי, זה מייעל מאוד את האלגוריתם כפי שנרצה בניתוח זמן הריצה.
זמן ריצה
מיון טופולוגי לוקח
הוכחת נכונות
יהי
וגם
נראה קודם ש
אם
אם
בסוף לפי למת ה Predecessor subgraph מתקיים כתוצאה מהנ״ל שאכן קיבלנו עץ מסלולים קצר ביותר עבור
Dijkstra’s Algorithm
בהנחה ופונקציית המשקל היא אי שלילית כלומר
רעיון האלגוריתם הוא להחזיק קבוצה
dijkstra(G,w,s)
initialize_single_source(G,s)
S = {}
Q.init(G.V, using: V.d)
while Q.is_not_empty:
u = Q.extract_min()
S = S.union(u)
for each v in adj(u):
relax(u,v,w)
קצת לא אינטואיטיבי לשים לב לזה אבל בשלב הראשון הקודקוד שיצא מהמינימום יהיה
נשים לב שיש כאן אלמנט של בחירה חמדנית, שהיא לקחת כל פעם את הקודקוד עם ערך d מינימלי, כלומר זה אלגוריתם חמדן
זמן ריצה
עבור
כיוון שכל קודקוד נכנס פעם אחת ל
אם כן, זמן הריצה תלוי במימוש
א) מערך:
ב) ערימה בינארית:
ג) ערימת פיבונאצי :
נכונות
כפי שאמרנו האלגוריתם הוא חמדני וניתן להוכיח אותו עם למות הבחירה, עם זאת, ארצה להראות שברגע ש
נב״ש כי זה לא מתקיים ונסמן ב
ניעזר בתכונה invariant של האלגוריתם , אינוריאנטה זאת תכונה שלא משתנה לאורך כל ריצת האלגוריתם, במקרה הזה התכונה הזאת תהיה שכל פעם שמתחילים לולאת while באלגוריתם יתקיים עבור כל
בסיס:
בפעם הראשונה שמגיעים ללולאת while מתקיים
צעד:
ניקח את קודקוד
ניקח את המסלול הקצר ביותר בינהם ונסמנו
כאן נכנסת לתמונה העובדה שבחרנו ב
לפני ש
ומתכונת התכנסות המסלול אנחנו יודעים שלאחר פעולת ההקלה יתקיים גם
כעת, ניקח את הרישא של
וגם בחרנו את
וסך הכל נקבל
המצב היחיד שזה יתקיים היא אם