Minimum Spanning Tree
מומלץ לקרוא את הגדרות בגרפים לפני שנכנסים לסיכום זה.
יהי
נגדיר את המשקל של
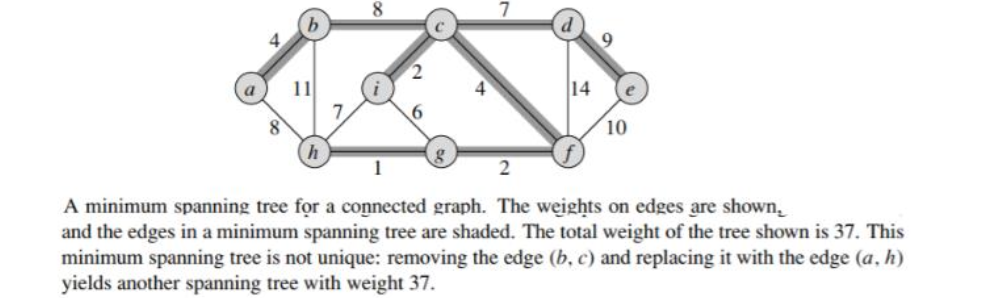
עץ פורש מינימלי MST של
נרצה לתכנן אלגוריתם שמקבל
ישנם שני אלגוריתמים חמדניים שמבצעים זאת ומבוססים על אותו אלגוריתם גנרי ובחירה חמדנית.
אומנם אנחנו מבקשים מולטי גרף קשיר אבל האלגוריתמים שנציג כאן הם אלגוריתמים שמבקשים גם גרף לא מכוון אחרת הם לא יעבדו
חתך
תהי קבוצת קודקודים לא ריקה
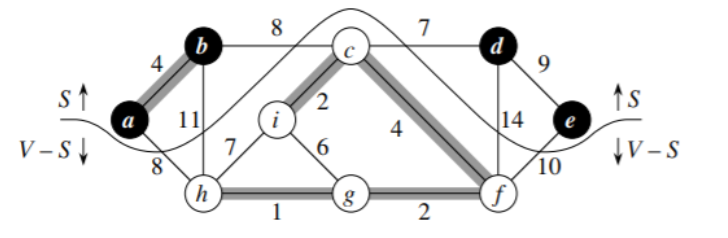
הבחירה החמדנית
יהי
הוכחה
ניקח קבוצת קודקודים
יהי
- אם
סיימנו. - אם
, כיוון ש עץ, חייב להיות מסלול פשוט מ ב , אנחנו יודעים שהמסלול הזה לא מכיל את הקשת , כלומר הוא עובר מצד אחד של החתך לצד השני באמצעות קשת חתך שאינה מינימלית. נסמן את הקשת הזאת (יכול להיות שיש עוד קשתות) אבל נגדיר שזאת הקשת הראשונה במסלול שהיא קשת חתך (מותר לנו להגדיר כאלה כי אנחנו יודעים שמספר הקשתות בחתך הוא לפחות אחד ואנחנו לא יודעים איפה הן נמצאות במסלול אז אין בעיה להגדיר את הראשונה מבינהן). כעת נוכל להסתכל על המסלול באופן הבא
כעת, נבנה גרף חדש
נרצה להראות ש
- עץ פורש
- משקל מינימלי
עץ פורש
מהקשר של
כלומר אם נוכיח ש
נוכיח שקיים מסלול בין כל שתי קודקודים
אם הקשת שהורדנו מ
אחרת,
הסיבה שהוא בטוח יופיע שם היא שעכשיו הורדנו את
נסתכל על
כאשר
כלומר מה שעשינו הוא ויתרנו על הקשת
אם כן, יש מסלול מכל נקודה לנקודה ולכן הגרף קשיר וסך הכל הוא גם עץ. מהגדרת עץ פורש מתקיים שהוא פורש את הגרף
המשקל של
נשווה בין המשקל של
מתקיים
סך הכל יתקיים
ואמרנו ש
סך הכל מחוקי אי שיוויון יתקיים
ולכן הבחירה החמדנית שאומרת שישנו עץ פורש מינימום שמכיל את הקשת הקלה בחתך נכונה.
צמצום קשתות והאלגוריתם הגנרי לעץ פורש מינימום
הצגנו את תכונת בחירה חמדנית של עצים פורשים מינימליים שנראת בסיס טוב לאלגוריתם חמדן שמוסיף ל MST בכל פעם את קשת החתך המינימלית עבור חתך כלשהו . למרות זאת , ייתכנו כאן שני קשיים :
הראשון , ההגדרה הרקורסיבית שנרצה להשתמש בה , טיפה לא ברורה , אופציה ראשונה היא למחוק קשת החתך המינימלית בחתך כלשהו מהגרף ופותרים באופן רקורסיבי עבור כל אחד משני החתכים , אבל אנחנו לא מבטיחים שאין עוד קשתות חתך שצריכות להיות בעץ הפורש המינימלי .
אופציה שניה למחוק את קשת החתך המינימלית מהגרף , אבל אחרי זה אנו צריכים שיטה להימנע ממעגלים בקשתות שבוחרים ל 𝑇𝑆𝑀.
צמצום קשתות
עבור מולטי גרף
והוא הגרף המתקבל מ
כעת נגדיר פונקצייה שממירה קודקוד גרף לקודקוד בגרף המצוצמם באופן הבא
סך הכל נוכל להגדיר את קבוצת הקשתות של הגרף המצומצם כך
נשים לב שבגלל שאנחנו עובדים עם גרף לא מכוון אז אין לולאות עצמיות. כמו כן תכונת הצמצום מאפשרת לנו לדעת בוודאות שלא יווצר מעגל כתוצאה מהצמצום בגלל שאין לולאות עצמיות.
כעת התכונה הזאת מאפשרת לנו לבנות את האלגוריתם הגנרי הבא
MST-Generic(G=(V,E),w)
while |V|>1
let e be the minimum weight edge of some cut in G
add e to E_t
conrtract e
return E_t
נשים לב שזה אלגוריתם גנרי ולא מימוש מלא. ישנם שתי אלגוריתמים שהם מימוש של הנ״ל והם נבדלים באיך שהם בוחרים את החתך. בחירה זו משנה את זמן הריצה.
הוכחת תת המבנה האופטימלי לאלגוריתם הגנרי
יהי
ויהי
תהי
אזי,
עץ פורש
ראשית נרצה להוכיח
אבל $$|E_{T}|=|E_{T^{\prime}}|+1= |V|-2+1= |V|-1$$
כעת הוכחנו שבהינתן שהוא גרף קשיר אז הוא עץ.
נוכיח שהוא קשיר, בהינתן שתי קודקודים
נפעיל את פונקציית הצמצום
אחרת הפתרון לבעיה הוא פשוט. כל מסלול שעובר בקודקוד
משקל מינימלי
נב״ש ש
ניקח
כעת ניקח
נשים לב ש
-
- לכל זוג קודקודים בגרף המצוצמם אם המסלול
בינהם משתמש ב אז בצמצום זה הפך להיות קודקוד אז המסלול עדיין קביל פשוט במקום לעבור בקשת של הגרף הוא עובר בקודקוד חדש, אחרת , אותו מסלול קיים גם בגרף המצומצם.
קיבלנו סך הכל
קיבלנו
אבל
סה״כ קיבלנו שבנייה של עפ״מ באופן ריקורסיבי על ידי הוספת קשת חתך מינימלי לתת עץ פורש מינימלי משאירה אותו מינימלי ולכן תכונת תת המבנה האופטימלית מתקיימת.
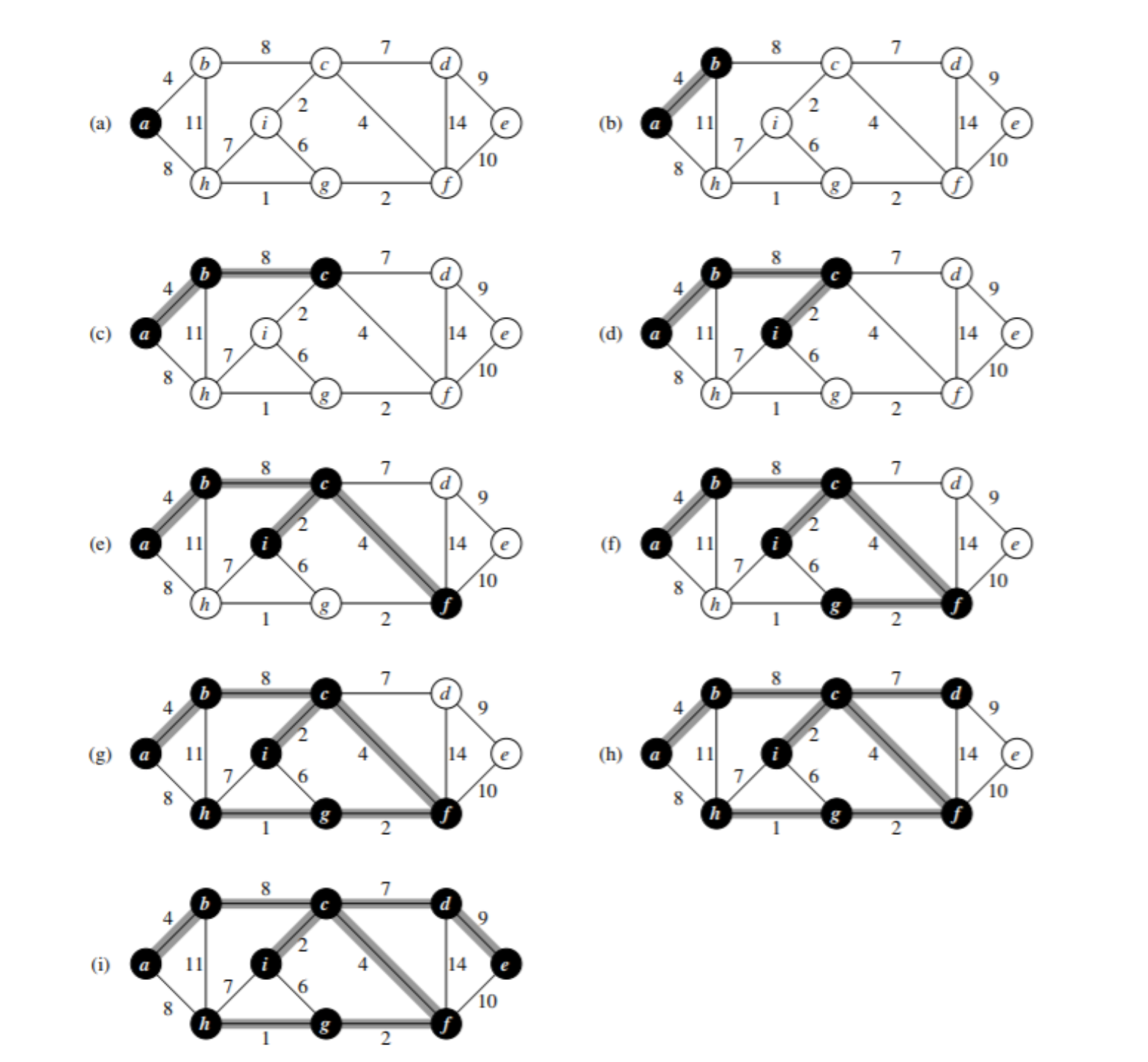
prim algorithm
הרעיון באלגוריתם פרים הוא להסתכל על החתך
על מנת לשלוט ביעילות האלגוריתם, הקודקוד ב
ז״א שאם יש קשת חתך שלא הצטמצמה , אז הקשת תהיה החתך הבא.
בגלל שמתסכלים רק על קשתות החתך, אנחנו נמנעים מסריקת כל הקשתות בכל איטרציה. אף על פי כן, צמצום קשת יכול להוסיף קשתות חדשות לחתך הבא.
כיוון שהגרף הוא מולטי גרף ייתכנו כמה קשתות בין אותם קודקודים כאשר לכל קשת מששקל שונה, אבל כיוון שמחפשים קשת חתך מינימלית בכל פעם, נוכל פשוט לשמור מידע עבור הקשת המינימלית בין זוג קודקודים.
באופן סכימתי האלגוריתם ייראה ככה:
- יצירת קבוצה שמאכלסת את כל הקשתות ב עץ פורש מינימלי. היא מתחילה כקבוצה ריקה.
- לכל קודקוד נוסיף מידע
שמייצג את הקודקוד אליו הוא מקושר בחתך ונוסיף ערך key שמייצג את המשקל אמ״מ הוא קשת חתך עם אחרת יהיה שם . כמו כן באופן שרירותי ניקח קודקוד אחת וניתן לו מפתח - מאתחלים תור קדימויות עם קודקודי
נסמנה , יחס הסדר הוא לפי ערכי המפתחות. - כל עוד התור לא ריק נוציא את המינימום
ונבדוק האם הוא מקושר ל או לא כלומר האם לא ריק (במילים אחרות נשאלת השאלה האם היא קשת חתך או לא) - אם הוא לא ריק אז מוסיפים אותו ל
כי הוא הקשת חתך המינימלית - רצים על כל השכנים של
בלי קשר להאם הוספנו אותו ל ובודקים האם שכן נמצא בתור Q וגם המשקל שלו עם קטן מ כלומר האם המשקל שלו עם u קטן מהמשקל שלו עם הקודקוד בחתך . - אם התנאי מתקיים משנים את ערך המפתח של
להיות המשקל שלו עם ואת של
נשים לב לשתי דברים חשובים
- הקודקוד הראשון
תמיד יצא באיטרצייה הראשונה. - אנחנו לעולם לא נבחר קודקוד שכבר משוייך ל
אחרת יהיה מעגל וזה בסתירה להגדרת העץ. זה נעשה על ידי הבדיקה האם השכן קיים בערימת מינימום.
ההצטמצמיות מבוצעות ע"י תור 𝑄 כאשר ערך ה- keys לכל קודקוד 𝑢 הוא המשקל של הקשת עם משקל מינימלי שמקשרת בין 𝑢 לקודקוים שנמחקו מ- 𝑄 . באתחול , כל ה- keys להיות ∞ . חוץ מהקודקוד השרירותו r שנבחר לראשונה , המפתח שלו הוא 0 בהתחלה . בנוסף מאתחלים Q להכיל את כל 𝑉 . וכך , הקודקוד הראשון שמוחקים מ- 𝑄 הוא 𝑟 , ואז מעדכנים את המפתחות לכל השכנים של 𝑟 להיות המשקל של הקשת ביניהם לבין 𝑟 . מהאיטרציה השניה והלאה , האינטרפרטציה צריכה להיות שכל הקודקודים שנמחקו מ- Q הצמצמו לקודקוד אחד. וכך , המפתח הקטן ביותר לקודקודים שעדיין ב- 𝑄 מייצגים את הקשת המינימלית שמקשרת אותם לקודקוד היחיד שהוצמצם . ולכן , האלגוריתם מוציא את הקודקוד 𝑢 עם המפתח עם המפתח הקטן ביותר ומוחק 𝑢 מהתור 𝑄. האינטרפרטציה היא שקשת חתך מינימלית מתווספת ל- 𝑇𝑆𝑀. על מנת לבצע צמצום של קשת חדשה שבחרנו להכנה לאיטרציה הקודמת , האלגוריתם סורק את כל השכנים של 𝑢 לבדוק אם המפתח שלו צריך הפחתה , עקב כניסת קשת חדשה לחתך.
MST-PRIM(G=(V,E),w)
E_T = empty_set
for each u in V
u.key = INFINITY
u.p = NULL
set r.key = 0 for some arbitrary r in V
Q.init(V)
while |Q| >= 1
u = Q.extract_min()
if u.p != NULL
E_T.add(u,u.p)
for each v in u.ADJ()
if Q.contains(v) and weight(u,v)< v.key
v.key = weight(u,v)
v.p = u
return E_T
זמן ריצה
זמן הריצה תלוי גם באימפלמנטצייה של
| operation | amount of times | Heaps using array | Binomial heap or Binary Heaps | Fibonacci Heap |
|---|---|---|---|---|
| Init | O(1) | O(V) | O(V) | O(V) |
| extract_min | V | O(V) | O(log(V)) | O(log(V)) |
| decrease_key | 2E | O(E) | O(log(V)) | O(1) amortized |
| total: | O(V^2) | O(E log(V) | O(Vlog(V)+E) |
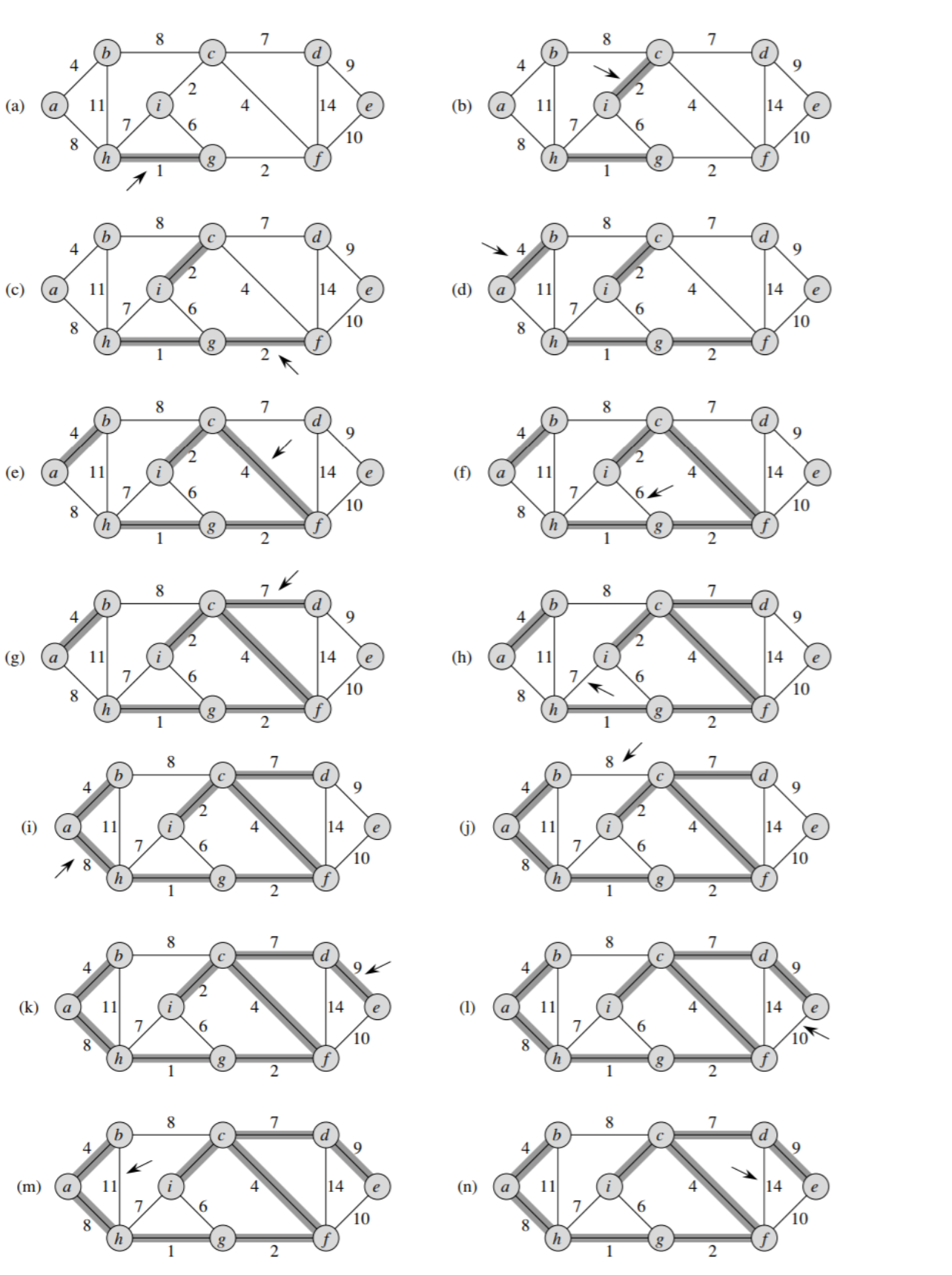
Kruskal algorithm
כדי להבין את האלגוריתם של prim מומלץ לעבור קודם על Union find .
הרעיון של האלגוריתם הזה הוא למצוא את הקשת המינימלית בגרף המצומצם ולהוסיף את הקשת הזו ל MST.
המימוש יעבוד כך:
- מיון הקשתות לפי המשקלים.
- סריקתם מהמינימום למקסימום
- על כל קשת
נבדוק האם הקשת מייצרת מעגל עם קבוצת הקשתות שכבר הוספנו ל MST - אם היא מייצרת מעגל לא מכניסים אותה, אחרת מכניסים ל MST.
נשים לב שעל מנת לבדוק האם
נזכיר שהפעולות שמבנה נתונים זה תומך הן make_set ו find_sey ו union על קבוצות מופרדות.
find_set(u)=find_set(v) .
MIST-Kruskal(G=(V,E),w)
E_T = empty_set
for each u in V
make set(u)
sort(E by w)
for each e = (u,v) in E
if find_set(u) != find_set(v)
E_T.add(e = (u,v))
union(u,v)
return E_T
זמן ריצה
במבנה נתונים union_find פעולת make_set לוקחת
כלומר זה תלוי כמה זמן לוקח למיין את E.